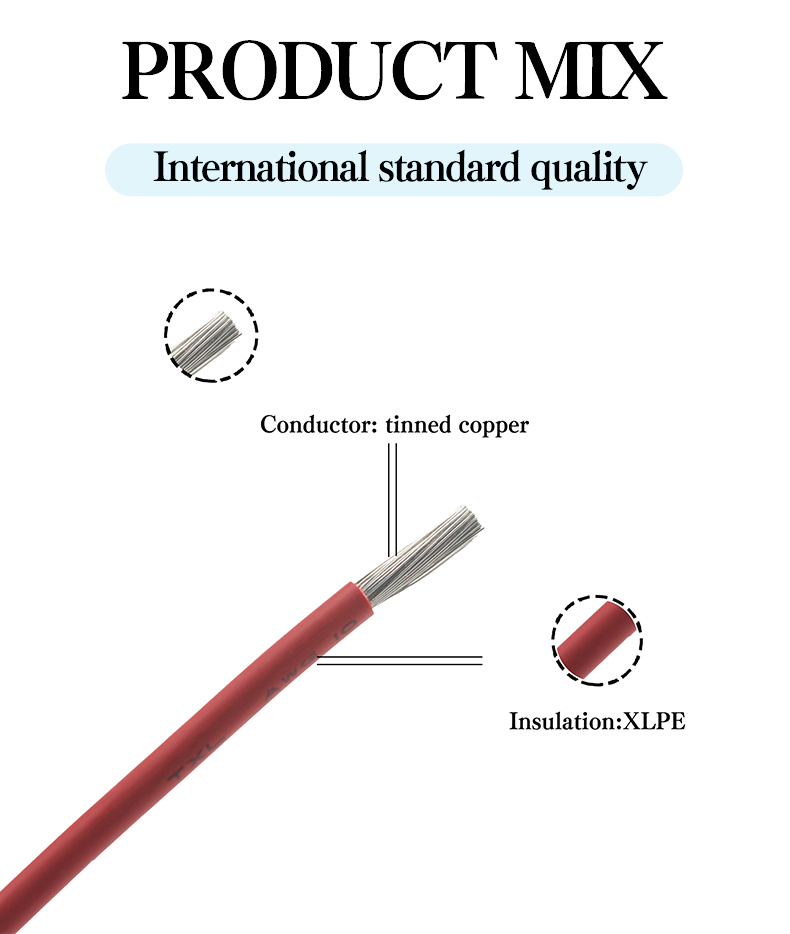
High temperature ROHS TXL cross linked XLPE copper automotive wire and cable











TXL motor line car line insulation using cross-linked polyolefin material, conductor using stranded 24-8AWG tinned or bare copper wire, environmental requirements meet ROHS, REACH standards, oil resistance, heat resistance, low temperature resistance, flame retardant, wear-resistant, has good mechanical properties, uniform thickness, low eccentricity, prevent current breakdown, ensure electrical safety, oxygen free pure copper inner core, High conductivity, low energy consumption, strong current load capacity, small resistance, good conductivity, prevent oxidation in the air for a long time, soft material, folding resistance is not easy to break, strong and durable, a variety of colors, a variety of specifications, can be customized according to requirements. This product is suitable for automobile, motor, motor controller, mobile electrical appliances, power tools, instruments, electronic equipment, telecommunication room, complete control cabinet, lighting engineering, mechanical equipment and automation device mobile connection.
Technical data:
| TYPE | AWG | WIRE TYPE | Conductor size | Core size | INSULATION THICKNESS | I.D. | Max Cond | STANDARD |
| (mm2) | (No/mm) | (mm) | (mm) | (mm) | Resistance | PUT-UP | ||
| (Ω/km,20℃) | (M/COIL) | |||||||
| TXL | 24 | 0.22 | 7/0.2 | 0.61 | 0.4 | 1.45 | 94.2 | 500 |
| 22 | 0.3 | 7/0.254 | 0.78 | 0.4 | 1.6 | 59.4 | ||
| 20 | 0.5 | 7/0.31 | 0.94 | 0.4 | 1.8 | 36.7 | ||
| 18 | 0.8 | 16/0.254 | 1.17 | 0.4 | 2.1 | 23.2 | ||
| 16 | 1 | 26/0.254 | 1.49 | 0.4 | 2.35 | 14.6 | ||
| 14 | 2 | 19/0.36 | 1.81 | 0.4 | 2.65 | 8.96 | 300 | |
| 12 | 3 | 19/0.45 | 2.26 | 0.45 | 3.2 | 5.64 | ||
| 10 | 5 | 19/0.57 | 2.86 | 0.5 | 3.9 | 3.546 | ||
| 8 | 8 | 50/0.45 | 3.57 | 0.55 | 4.8 | 2.23 | 200 |
Application Scenario:




Global Exhibitions:




Company Profile:
DANYANG WINPOWER WIRE&CABLE MFG CO., LTD currently covers an area of 17000m2, has 40000m2 of modern production plants, 25 production lines, specializing in the production of high-quality new energy cables, energy storage cables, solar cable, EV cable, UL hookup wires, CCC wires, irradiation cross-linked wires, and various customized wires and wire harness processing.

Packing & Delivery:





Products categories
-

China Factory Wholesale SXL American Standard A...
-

Supplier Wholesale Custom SGT Automotive Car Ca...
-

Manufacturer Wholesale GPT Automotive Battery C...
-

Supplier Wholesale Custom HDT Automotive Cables
-

GXL 14awg Low-voltage cables for automobiles fo...
-

Supplier Wholesale Custom SGX Automotive Car Ca...